Sample_ADAS_EXTERNALVEHICLE
This guide explains how to use the Sample “ADAS_EXTERNALVEHICLE” available in the Samples Pack.
Goal
This sample shows how to synchronize a Simulink dynamic vehicle model with an ADAS with SCANeR studio in non-real time running at 2000 hz.
How to use it
Once in the SAMPLE_ADAS_EXTERNALVEHICLE configuration:
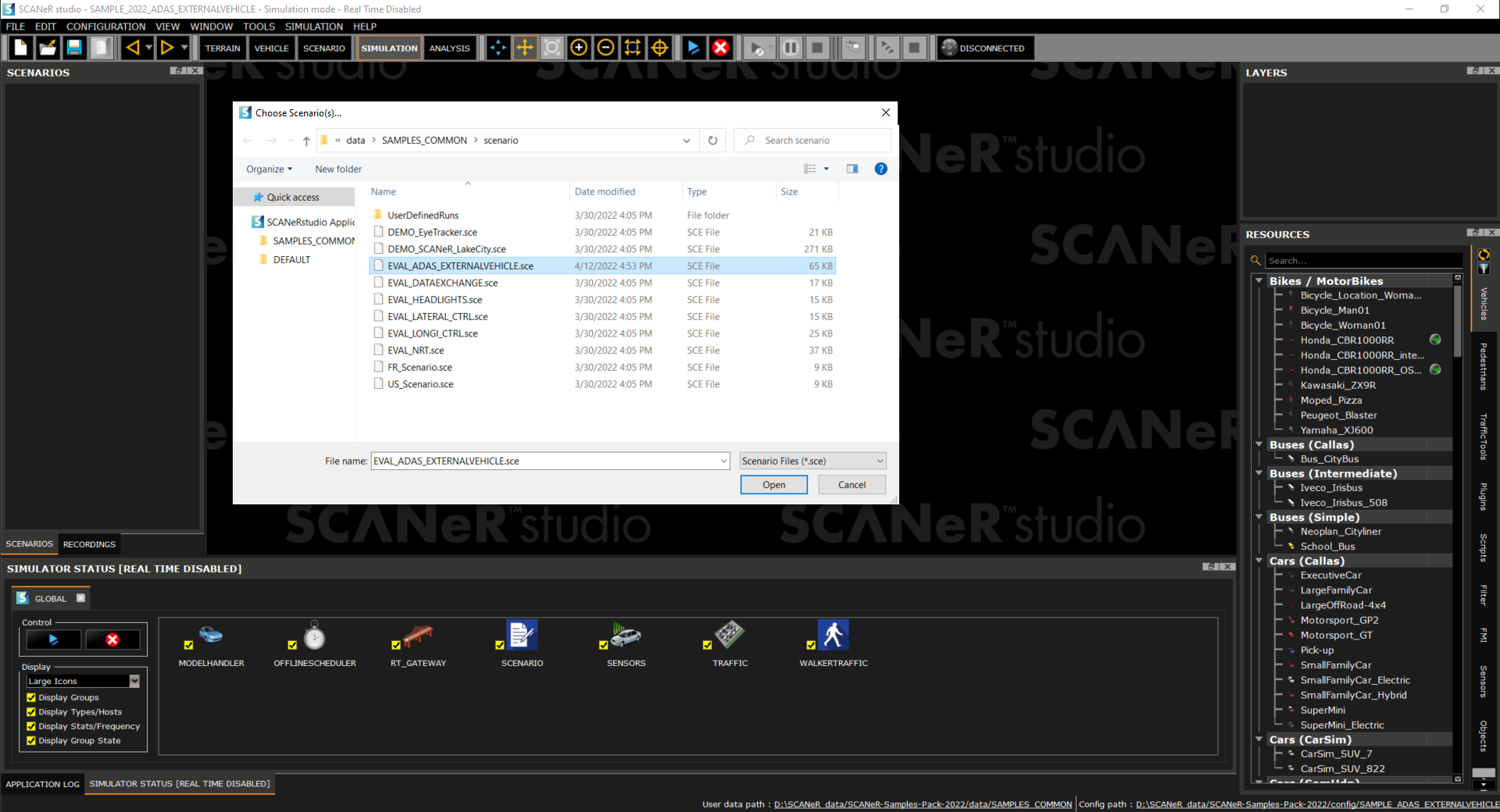
- Open the scenario “EVAL_ADAS_EXTERNALVEHICLE.sce”,
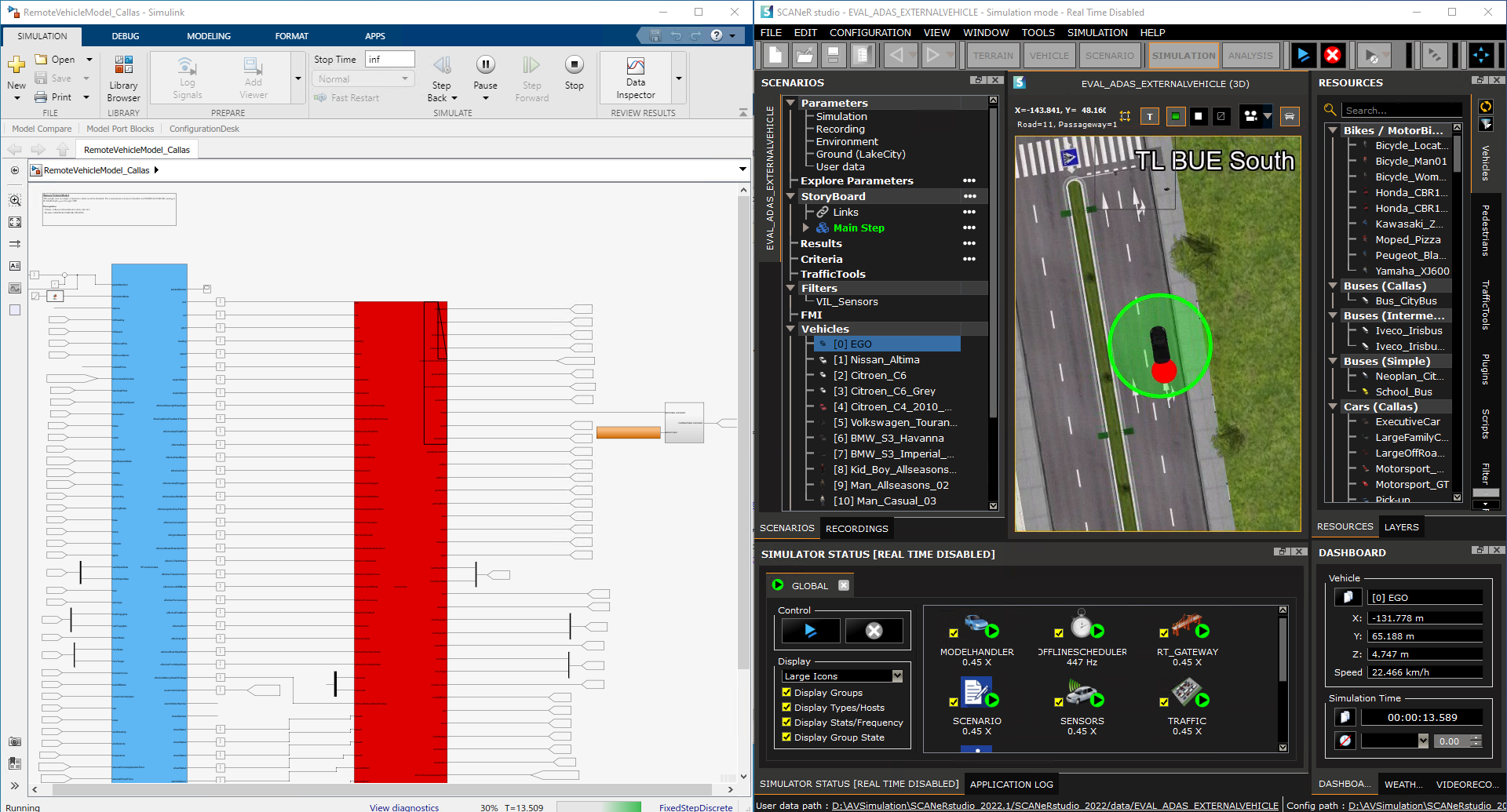
- Open MATLAB and the Simulink model “\SCANeR-Samples-Pack-20xx\APIs\samples\VehicleDynamics\RemoteVehicleModel\EVAL_ADAS_EXTERNALVEHICLE\RemoteVehicleModel_Callas.slx”,
If it’s your first time using MATLAB with SCANeR, an additional step is required. You will find more information in SCANeR’s User Manual, chapter
2.3.3.3.1. First time installation. This step will add necessary pathes to the MATLAB Set Path and prepare Simulink libraries according to current MATLAB version.
-
Run the Simulink model and configuration modules,
-
Play the scenario.
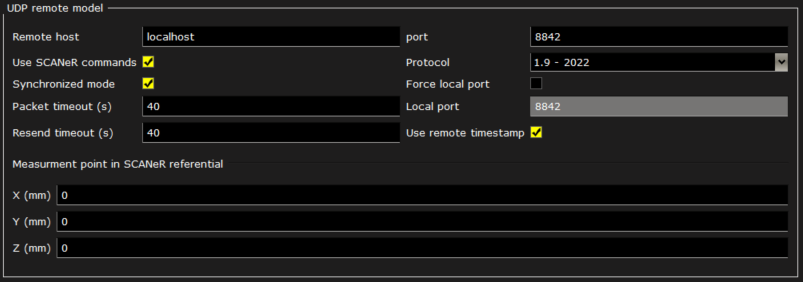
In this scenario, the UDP communication port used for the remote model is 8842. Using a firewall/antivirus may block the communication. To prevent this, you may simply allow it or modify it in the sample. (“right click/Edit model…” on the EGO vehicle to display the vehicle in the VEHICLE mode and edit it.)
During the simulation
You will then be able to visualize that the simulink model with ADAS is synchronised with SCANeR.
Due to the S-function, the vehicle will start after few seconds.
The SCANeR API is accessible in Simulink within the Vehicle Dynamics ComUDP API through RT Gateway and its filter.
More information in SCANeR’s User Manual:
2.16. UDP RTGateway protocol
The operating frequencies of the modules are orchestrated by the Offline Scheduler.
More information in SCANeR’s User Manual:
7.28.1. Offline Scheduler